
前編はこちら。「改めて知りたい、人工知能とは何か?:新刊『人工知能のための哲学塾』第零夜(前編)」
中編はこちら。「人工知能は身体を欲している?:新刊『人工知能のための哲学塾』第零夜(中編)」
「人工知能のための哲学塾 第零夜」(後編)目次
第5節 生態学的人工知能
・無意識的な知性
第6節 生物の主観を構築する
・知識表現
第7節 身体の問題
第8節 経験とは何か?
第5節 生態学的人工知能
これまで人工知能は推論、検索、学習など、いろいろな機能に着目して人間が持っている知的機能をソフトウェアに写し取る、ということをしてきました。そうではなく、環境との関わりの中で人工知能をとらえようという、という姿勢が、生態学的人工知能です。
60年前だったら、これは何を言っているかわからないと思います。テレビゲームみたいなゲームの世界もなく、コンピュータはまだ大型機(メインフレーム)しかなかったわけですから。こういう発想が出てくるのは、コンピュータの世界の進歩をだいぶ長い間待たなければなりませんでした。しかも最近になって、テレビゲームが進化したり、バーチャル空間が出てきて、人工知能に、人間と同じ物理世界を与えたり、あるいはインターネットみたいにネット空間を与えることができるようになりました。
いまなら、これまで認知科学、生態学的認知科学などが培ってきた知見を人工知能に取り入れることができます。僕は2009年にCEDEC(ゲーム開発者向けカンファレンス)で「生態学的ゲームAI論」という講演をしまして、その知見を使って作ったゲームもあります。
もう一度、人体図に戻りましょう。脳の中心の部位は身体とつながっていて、それによって脳から身体にいろいろな神経系がいき渡っています。脳は常に身体とともにあり、身体は環境とともにあります。脳というものを環境と一緒に考えるのは極めて自然なことなのかもしれません。
続いて、意識と無意識の部分について立ち戻ると、いままで見てきたのは意識的な知性です。ここでは無意識の部分について話していきたいと思います。
無意識的な知性
無意識的な知性(知能の無意識な部分)を作るにはどうしたらいいのか? ゲーム業界に入って何年か経ってからですが、「そういえばここはどうすればいいんだろう」と、いろいろな局面で問題につきあたりました。単に、アニメーションの再生によってキャラクターの動きをつけるとかではなく、本当に身体を持っている人工知能を作るときにこの無意識的な知能が必要になってきたのです。
上のほう(意識的)はエージェントアーキテクチャで思考回路を作るとしても、そこと身体につながっていく途中にある無意識的な知能をつなぐ理論が必要だということに気付いたわけです。
経験則からいえば、下の部分(無意識的)を作るのは、上の部分(意識的)よりも難しいです。知能の中で、実は世界に本当に向き合っているのは下の部分です。先程も述べたように、上の部分では、いろいろな階層を経ていわば濾過された後の情報、つまり意識にとってクリーンな世界をとらえています。すでにある程度の(実は膨大な)情報処理が入った後の世界を見ているわけです。
下の無意識の部分は、無限の可能性と無限の矛盾に満ちた世界から行動に必要な情報をふくむ世界を作り上げて世界を見せています。ですから、こういった無意識の知能を作るためには、認知科学の知識が必要になってきます。
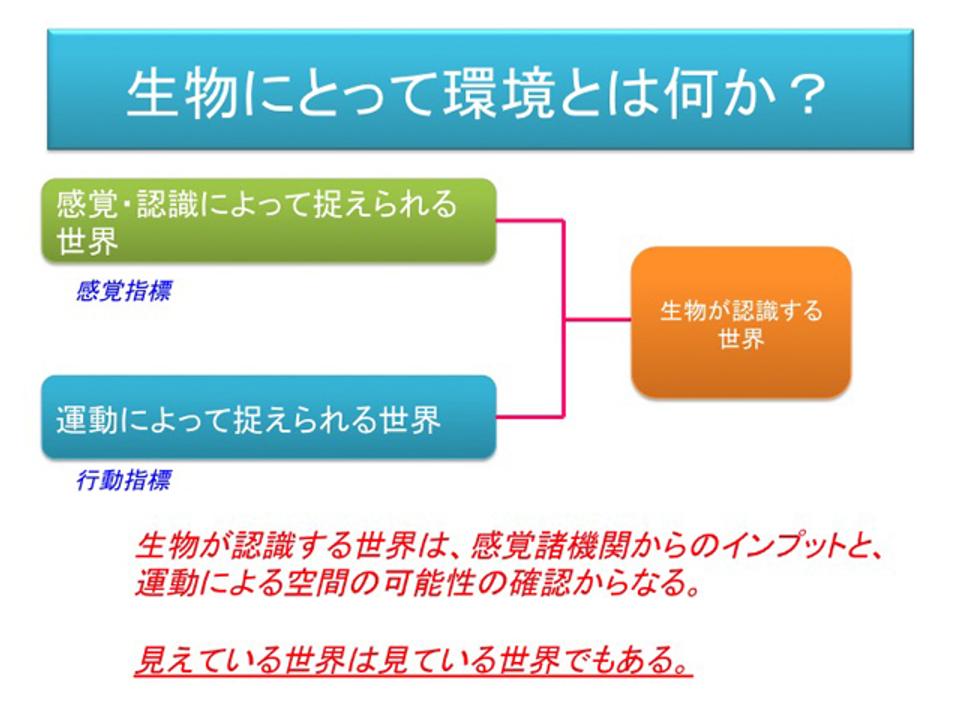
生物が認識する世界には2つあります。感覚・認識によってとらえられる(感覚指標)世界と、運動によってとらえられる(行動指標)世界です。「指標」というのは現象学の言葉でもありますが、この2つの世界が重なり合って主観的な世界として見えています。身体を持って、単に外から情報を得るだけではなく、アクティブに世界に向き合うというのが我々の世界なのです。
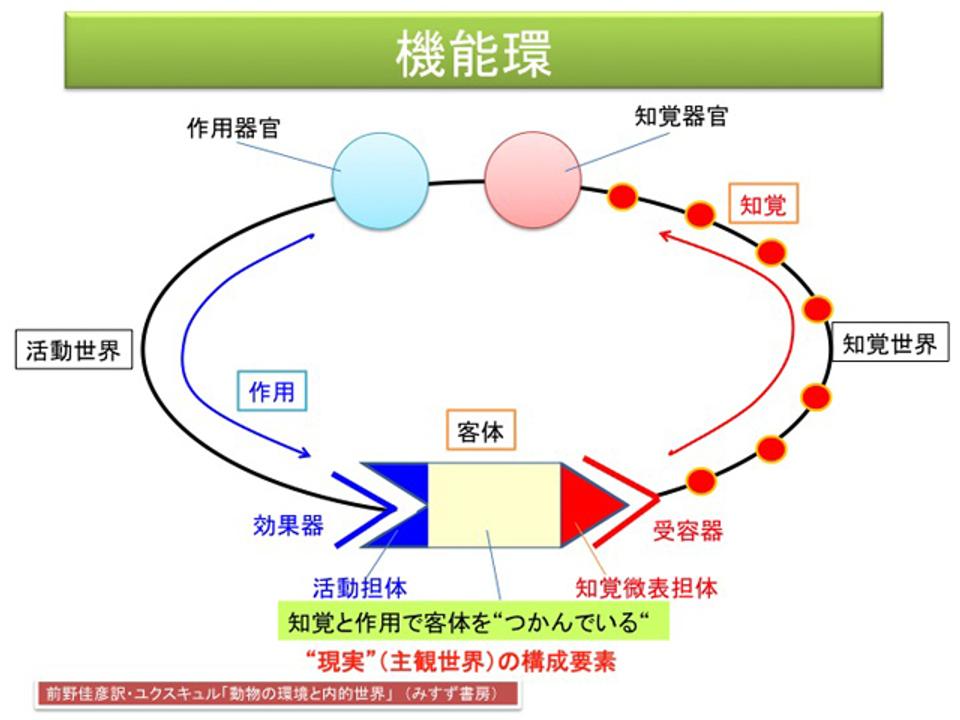
環世界のスキーム(=2つの世界が見えている)、これを最初に言ったのがユクスキュルです。彼の本に書いてある環世界の図は、人工知能から見るとエージェントアーキテクチャそのもので、エフェクターと作用器官、センサーと知覚器官が対応します。
ちょっと異なるのが知覚器官によって対象をつかんでいるのと同時に、作用器官によっても対象をつかんでいるというところです。動物は知覚器官と作用器官で世界をつかんでいる。動物に見えている世界はこの循環の中にあるもの、それ以外は主観的世界に存在しないのだとユクスキュルは言っています。
(ユクスキュル/クリサート『生物から見た世界』岩波文庫)
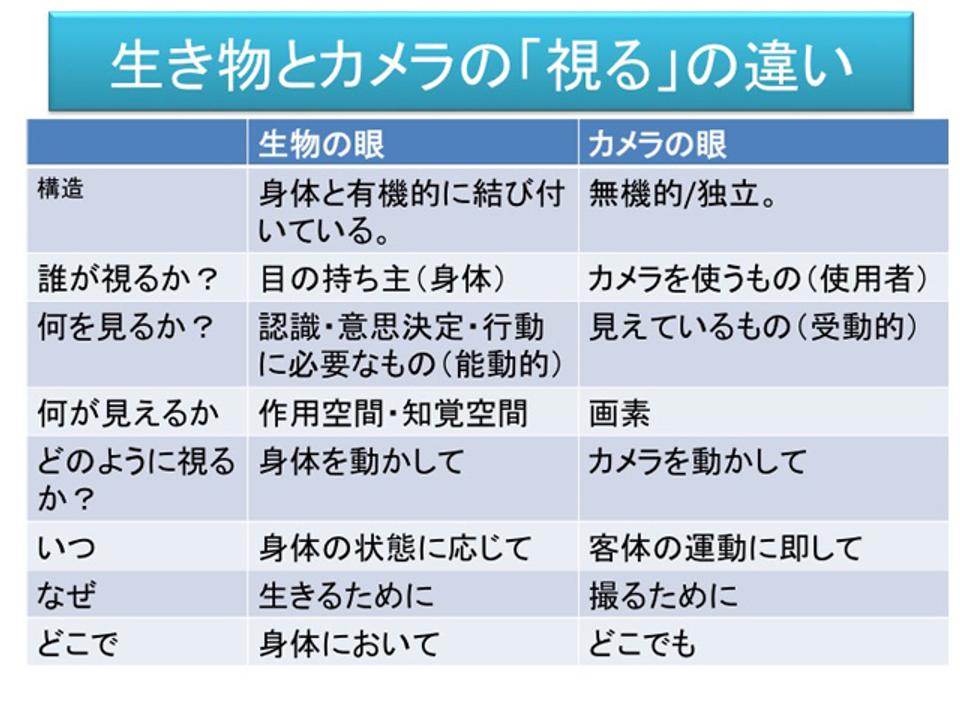
意味がちょっとわかりにくいと思いますので、まず、こういうことを考えてみましょう。生き物が「視る」ということと、カメラが「視る」ことはどう違うのでしょうか?
生物は何をどう見ているのか? 眼は生物にとって基本的な器官で、生物の知能と身体と深く結びついている能動的な眼であり、カメラは使用者の意思に従う受動的な眼です。つまり生物が視ることは、自分の生態に応じて見ていることであり、自分の捕食対象など生理に応じた対象(感覚指標)を探しつつ、同時に、それに対して自分の身体を動かすポイント(作用指標)を探しています。
カエルはアメンボに反応して舌を伸ばします。キリンは灌木を見つけて首を伸ばして食します。これは第五夜で扱うメルロ=ポンティの「視ることは視られることでもある」という言葉に通じますし、またベルンシュタインの運動学にもまた通じるところです。生理学、生物学、現象学は生物を多面的に見た結果であり、そのすべてはつながっているのです。
作用空間、感覚空間、この2つが重なり合った世界を「環世界」といいます。環世界は生物の持つ「生態」が生み出す世界、自分自身の身体が生み出す世界です。身体を持つ知能は生態を持ち、生態を持つ生き物は必ず環世界を持ちます(身体がないものは生態がありません)。
エージェントアーキテクチャに環世界の概念を合わせてみます。身体がアクションをしようとしたときに見える世界と感覚によってとらえられる世界の2つがあり、その間を意志が流れて世界をがっちりつかんでいます。
知覚指標の集合のことを「知覚空間」、作用指標の集合を「作用空間」といいます。生物は、世界をこの2つの側面からとらえていて、この2つによって行動が可能となります。ユクスキュルが書いた『生物から見た世界』はとても重要な本です。AIを研究する方は読んでおいたほうが良い本です。
主体が知覚するものはすべてのその知覚世界になり、作用するものはすべてその作用世界になるからである。知覚世界と作用世界が連れだって環世界(Umwelt)という一つの完結した全体を作りあげているのだ。[ユクスキュル『生物から見た世界』(岩波文庫、2005年)p.7]
この完結した、というところが重要なポイントで、ユクスキュルが言わんとしているのは、その世界から動物、人間は出られないのだということです。その世界こそが、生物の持つすべての世界だ、ということです。
もう1冊、ユクスキュルの有名な本があります。『動物の環境と内的世界』、これは「生物から見た世界」をもう少し拡大しています。
すべての動物種の「環境」は、「知覚世界」と「作用世界」に二分することができる。この二分された世界は、動物の身体という「内的世界」によって、ふたたびひとつの全体へ統合されている。[ユクスキュル『動物の環境と内的世界』(みすず書房、2012年)p.330]
2つをつなぐものが内的世界で、先ほどのエージェントアーキテクチャでいう知能です。知覚世界、作用世界、内的世界、この3つの世界によって知能ができているのだというのが環世界の考え方です。こうした環世界というのは、いろいろな生物ごとに相対的に定義されていて、実は絶対的な時間や空間は存在しないのだとユクスキュルは言っています。
この環世界(Umwelt)という言葉は、いろいろな思想家に影響を与えています。
勿論、人間は、人間であるより以前に、先ず動物である。そして動物もまた、それぞれ「自分の世界」(フォン・ユクスキュールのいわゆる「環境世界」Umwelt)に住んでいる。ということは、すなわち、動物もまた、種ごとに、その生物学的基本欲求と、感覚器官の形態学的構造の特殊性とに条件づけられながら、それぞれ違った形で存在を秩序づけている。つまり、生物は、動物的次元において、既に存在を「分節」しているということだ。[井筒俊彦『意味の深みへ』(岩波書店、1985年)、p.53]
「つまり、生物は、動物的次元において、既に存在を『分節』しているということだ」という部分がおもしろいところで、「Umwelt」は、ソシュールの言語によって分節化されている世界の起源であると言っているわけです。我々の身体によって分節化されている世界が言語として見えていると井筒先生は言っています。ここにおいて、生物学的知見、哲学的知見、言語学的知見がちょうど融合しているのです。
作用世界と知覚世界の2つがあって世界が見えている。それぞれの動物が自身の身体でいろいろな世界を無意識に解釈している。恣意的ではあるのですが、そう見えている。人間もそうです。見えている世界はかたつむりの殻みたいに、そこから逃れることができない。生物がその身体を持つ限り、それはあらかじめ決められた世界なのだというのが、環世界の言わんとしているところです。
たとえば、魚、キリン、チーター、ミツバチ。ミツバチにとっては、草のところは関係ないので、蜜のある花の部分を感知するだろうとか、カタツムリがどういう世界を見ているかという実験です。
(1)かたつむりをゴムボールに乗せる
(2)カタツムリの前に棒を出し入れする
(3)棒の出し入れの頻度を変化させる
すると、ゆっくり、1秒間に1~3回の出し入れの頻度ではカタツムリにも動いていることがわかり、棒を渡ろうとしないのですが、4回以上だと棒を渡ろうとする。カタツムリの認識はとても遅いということがわかります。物の振動が1秒間に4回以上だと、彼らには止まって見えてしまうのです。カタツムリにとって環世界のアップデート回数は4回/秒以下、人間は18回/秒程度と言われています。アニメは24fps、ゲームは30fpsで回しますが、そうした環世界を利用して表現しているわけです。
また、こんなニワトリの実験があります。ニワトリの雛を透明の防音ボールで閉じ込めてもニワトリは雛を探そうとしません。ボールの中でいくら雛が鳴いていても親鳥はわからない。逆に、声は聞こえるけれど、見えないような衝立の後ろに雛を隠すと、親鳥は怒って助けにいこうとします。視覚は二番目で、ニワトリは音を使って世界を認識しているということがわかります。
ユクスキュルという人は、とても巧妙な実験をやってのける人で、長い研究期間を経て、いろいろな動物を研究して自分の理論を確立していきます。生物学の人ですが、いろいろな思想家に影響を与えた人です。
第6節 生物の主観を構築する
先ほどの理論から言うと、人工知能を作るときも環境世界を恣意的に作ってあげれば、より環境に則した生き生きとした知能を作れるということが導き出されるわけです。つまり、作用指標と感覚指標を人工的にその世界に埋め込んでおくことでその生物の環世界を人工的に作るというアイデアです。
こういうテクニックは、人工知能の世界では「知識表現(Knowledge Representation)」と言います。生物が本来認識するべき指標を「知識表現」を使って人工的に作ってあげるということです。つまり、AIとゲーム世界の中間の領域を作ってあげましょう、それも作用世界と感覚世界をきちんと作ってあげましょうということです。
知識表現
ゲームで使う知識表現にはいろいろありまして、その中に「依存グラフ」があります。たとえば、軍隊を作るには鉄と訓練所が必要で、訓練所を作るには人と木が必要だと。これはテックツリーとも言いますが、このプラットフォームを人工知能が認識することで、「軍隊が必要だ」となると、必要となるいろいろなものを自分で集め始めるわけです。
「意味ネットワーク」は言葉の間の関係を表し、「敵表現リスト」は敵の心理学的脅威を表現しています。もうひとつは「世界表現」(World Representation)という話があります。これは環境に対する表現です。
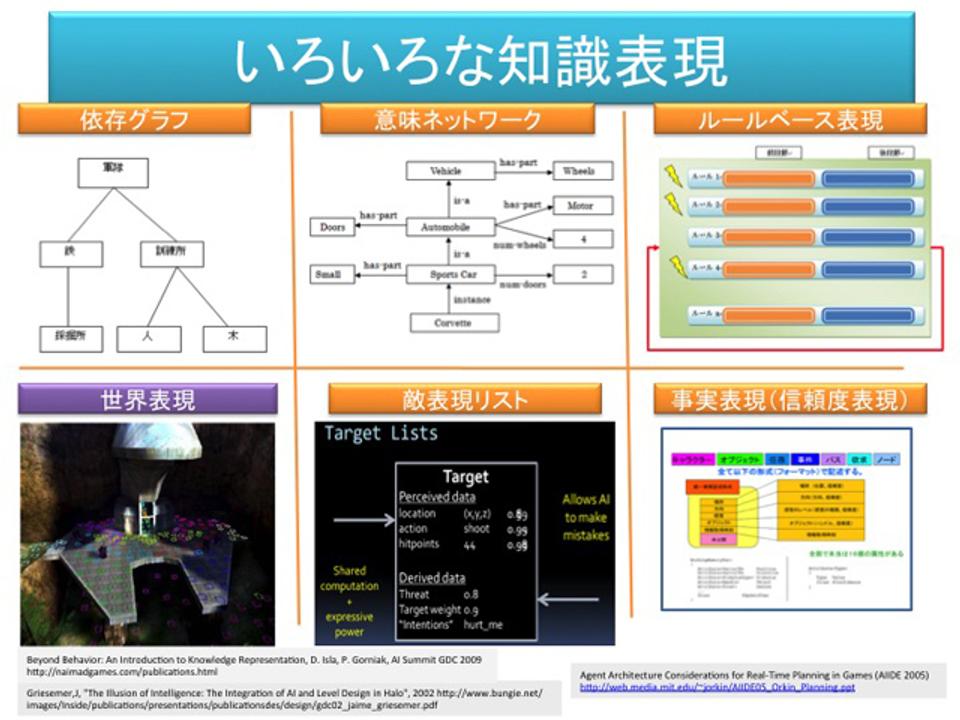
Beyond Behavior: An Introduction to Knowledge Representation, D. Isla, P. Gorniak, AI Summit GDC 2009, Jaine Griesemer,"The Illusion of Intelligence: The Integration of AI and Level Design in Halo", Agent Architecture Considerations for Real-Time Planning in Games (AIIDE 2005)
ここでちょっとまとめますと、生物とカメラの「視る」はどう違うのかというのが知能を考えるヒントになります。カメラは無機的な存在で、生物の眼は身体と結びついて何かを見ている。カメラは持ち主が視るものですが、視るものはカメラの画像です。一方、生物の眼は持ち主が能動的に視るもの。何を見ているかというと、作用空間と知覚空間です。いろいろな違いが明確になっています。
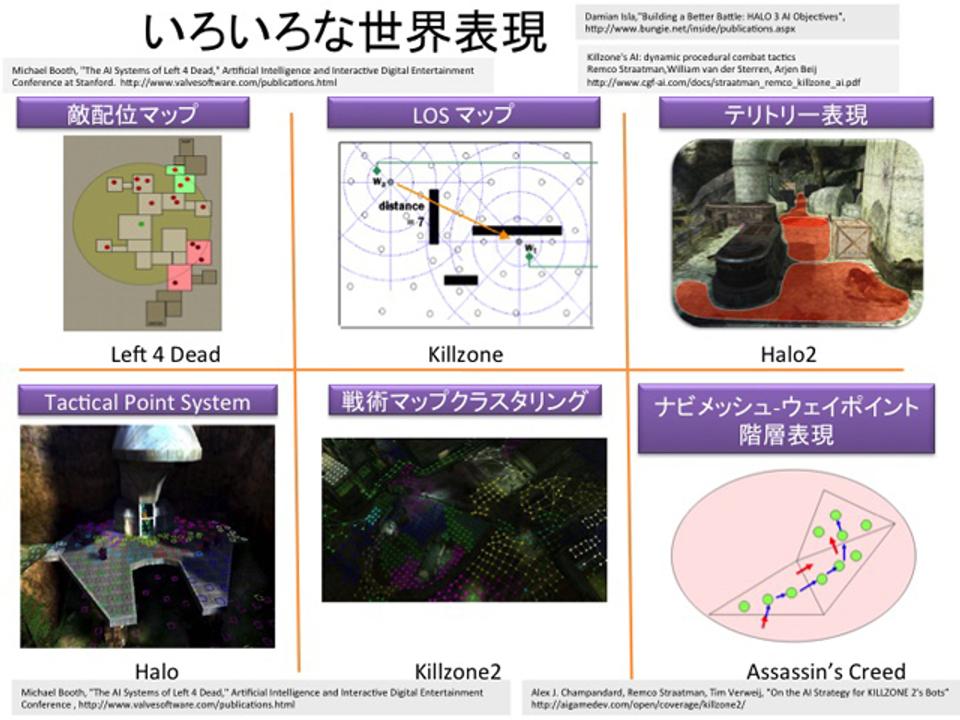
先ほどの「世界表現」が何かというと、この世界全体の環境に対して、どういう表現をするかということ。ゲームの中のいろいろなマップはユーザーには見えませんが、人工知能のいろいろな指標が埋め込まれています。
たとえば、「LOSマップ」(可視化領域)の情報は、そのポイントの周囲で自由に歩ける領域情報のことです。「Halo2」(Bungie, 2004)ではテリトリーとしてその陣営が支配する複数の小さな領域が定義されており、あるいは「Assassin's Creed」(ubisoft, 2008)では、歩ける領域を示すナビゲーションメッシュの上に、さらに詳細な歩ける位置を示すウェイポイントをたくさん作っています。。「Killzone2」(Guerrilla Games、2009)の場合は、その場所における敵の勢力を表す領域マップ(インフルエンスマップといいます)に敵の脅威をリアルタイムに書き込むことができます。
こういうふうに指標を世界に埋め込むことでゲームAIはどんどん賢くなる。いろいろな埋め込み方、いろいろな指標の立て方があって、それによってキャラクターが動きます。それが世界表現です。
加えて、「オブジェクト表現」というものもあります。これは、モノに対する表現です。たとえば、ドアのレバーを引くと開きますというのはルールの知識表現、車というのは動かすことができますという知識表現です。このように、ものに対する知識表現を埋め込んでいくことで、キャラクターが動作することができます。
Michael Booth, "The AI Systems of Left 4 Dead," Artificial Intelligence and Interactive Digital Entertainment Conference at Stanford, Killzone's AI: dynamic procedural combat tactics(Remco Straatman,William van der Sterren, Arjen Beij), Damian Isla,"Building a Better Battle: HALO 3 AI Objectives, Michael Booth, "The AI Systems of Left 4 Dead," Artificial Intelligence and Interactive Digital Entertainment Conference, Alex J. Champandard, Remco Straatman, Tim Verweij, "On the AI Strategy for KILLZONE 2's Bots"
アフォーダンス
ここでアフォーダンスの話をします。これは系統的にいうと、先ほどの環世界の延長にある概念です。ギブソンは主に20世紀の中盤に活躍した生態学的心理学の有名な創始者ですが、彼がアフォーダンスという概念を提唱しました。
環境に存在する事物の「価値」や「意味」が直接的に知覚されることを示している[ギブソン「生態学的視覚論」(サイエンス社、1985年)、p137]
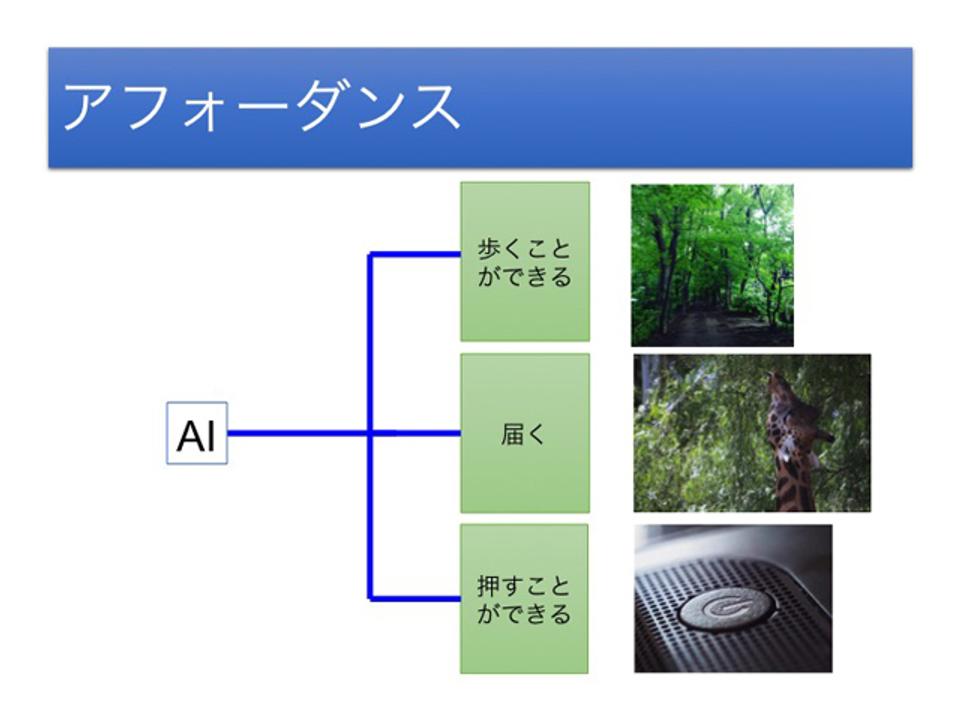
つまり、知覚から得ている情報がその生物にとってどういう価値を持つかということです。たとえば、「リンゴ」だったら「食べる」、「車」だったら「動かす」など、自分の身体から解釈された情報が認識として現れています。これがアフォーダンスという概念です。
アフォーダンスをゲームAIで最初に使ったのが「Halo2」です。たとえば、ここに車があるとき「どっちに動かすことができるのか」、「乗って移動することができる」とか、ものに対する許された(アフォードされた)行動を「モノ」そのものに埋め込むことで、AIがその世界に入ったときに何ができるのか示すことができます。
「リンゴ→食べることができる」、「ハシゴ→のぼることができる」というように、ものに対しアフォーダンス情報をタグづけすることで、人工的に作用空間を作ることができます。あるいは、道や山肌という環境に対し「歩くことができる」、ボタンに「押すことができる」などもそうですね。
「歩く」に関してはいろいろな方法があり、ゲームマップにナビゲーションメッシュという四角形が敷き詰めて、四角形には「ここを歩くことができる」というアフォーダンスを付与しておきます。するとキャラクターは四角形をたどることで移動することができるようになります。
より詳細に言うと、隣接する四角形のデータをそれぞれの四角形が持つことで「ネットワークグラフ」を作ってパス検索をするというのが、現代のゲームのデフォルトの方法です。こういうデータがあると、マップ上のどの二点間の間のパスもリアルタイムに計算できますので、とても長い移動をすることができます。
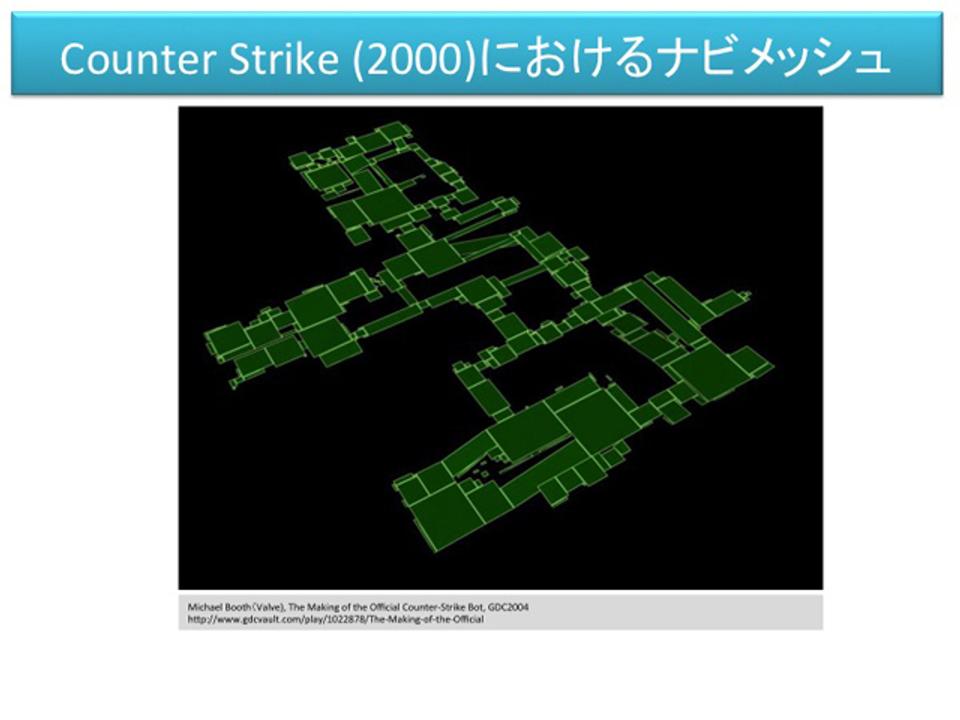
昔のファミコンのゲームでは、部屋の中にモンスターが閉じ込められていたり、待ち構えていたりしますが、最近のゲームでは、AIが移動できる範囲のパスを計算することで行動範囲が広がっています。行動範囲が広がるということは意思決定に対しての幅が広がる、アフォードされる可能性空間が広がるということになります。
第7節 身体の問題
次に身体の問題について。身体とモノは違います。モノは作用に対する反作用がすぐに返ってきます。たとえば、押すとポンと向こうにいく。生命体は、何か作用があると知性の中のいろいろな処理を経て反作用を返す。抽象的な次元で、作用と反作用に遅延があります。
「両義性」という言葉がありますが、身体はとてもおもしろいと哲学の人はいいます。身体は物質、たんぱく質だけど、精神がある。また、「自分」である、だけれど「対象」でもある。このような2つの相反する属性を持っているのが身体。それが両義性の概念です。
たとえば、バスケットをするときに、いろいろなスケールで運動を組み立てていきます。位置取りをする、中に入ると中距離で考えて、至近距離ではボールをゴールにシュートする、というように階層的に考えます。
この分野で有名なのは、ベルンシュタインが書いた「デクステリティ 巧みさとその発達」(金子書房、2003)です。この本は製本されることなく長い間眠っていましたが、ようやく90年代になってから英語版が発刊されることになりました。しかし、これは本当に素晴らしい本です。人間の身体の運動の原理を見事に解明しています。
この本はとてもおもしろい理論を立てています。運動というのは4つのレベルに分解される、その4つのレベルがお互いに協応することで運動がジェネレートされていくのだ、とベルンシュタインは言います。そういった巧みな行動というのは、4つの層の協応によってすべて生み出されます。
またもうひとつ重要な視座としては、運動と感覚は連動しているということ。バスケットでジャンプしたときに何を見るかというのは実は決まっている。何か運動しようとしたとき、たとえば椅子を動かそうとしたときに見るポイントがあります。運動だけではなく何を見るかというのは決まっている、作用と知覚はひとつの協調関係にあるというのが、彼が言わんとするところです。これが先ほどの環世界の話と結びついていて、視覚世界と作用世界はある関係の上で成り立っています。
ここまでの話を振り返りますと、まずデカルトから出発しました。デカルトの哲学はいろいろな機械的な学問、つまり「メカニズム」を作りました。しかし、デカルト的世界観に対してカウンター的な哲学が登場します。心理学的な現象を機械的に説明しようとしたときに、「それは違う」と言ったのがフッサールで、何かをすべて論理的な要素に分解して学問になっているフリをするのはもうやめよう、そうではなくて、我々にとって確実なのが経験だとし、「生きられる経験」によって世界を考えましょうというのが、現象学という分野です。キーワードは「経験」です。
第8節 経験とは何か?
フッサールは、現在、現象学と呼ばれる学問の創始者です。活躍したのは20世紀初頭です。現象学は単なるひとつの学問ではなくて、デカルトの方法論が近代学問の母体になったように、それに匹敵する新しい母体として、新しく学問全体を再定義しようとした哲学です。
フッサールの書いた「イデーン」はすこし読みにくのですが、20世紀で最も重要な哲学書のひとつです。フランスにおける後継者のメルロ=ポンティの文章はとてもわかりやすいです(「知覚の現象学」など)。メルロ=ポンティは、我々は諸経験を連結する、経験というものをずっと連結していく存在としてここにあって、経験というものをつないでひとつの存在なのだといいます。
デカルトはいろいろな反省を突き詰めていって「我」を疑います。そこから有名な「我思う、ゆえに我あり」が出てくるのですが、フッサールの場合、そうではなくて、「常にいまここにあるという経験」があって、生きられた経験から学問を展開する、展開しようというのが現象学です。
学問そのものを書き換えようという野心的な試みです。実際、多くの後継者を生んで、いまでも現象学はヨーロッパ哲学のひとつの大きな潮流になっています。メルロ=ポンティの「知覚の現象学」は名著なので、現象学に入る人はこの本から入るとよいと思います。
現象学から始めて人工知能を作るとしたら、どのような人工知能になるかというのはあまり探求されていなくて、フロンティアな領域です。僕が現象学から人工知能を作ろうと考えたのは15年前、大学にいた頃です。
デカルト的世界観では最初にまず「我」があるところから始まります。知能があって、それが対象となる世界を知覚します。現象学は違うのですね。体験があって、その体験の中から世界と自分が浮かび上がってくる、とします。つまり、自分というものが現象学的関連によって獲得されなければならない。
もし現象学で人工知能を作るとしたら、おそらくエージェントアーキテクチャの中で自分に返ってくる、自分の行動と世界が混在しているものの中から、もう一度自分を獲得するということになるはずなのです。これについては第一夜で説明しましょう(「人工知能のための哲学塾」p21〜参照)。
ハイデガーがよく出す例に、金槌と釘があります。金槌で釘を打っていると、自分と金槌が一体になって、しまいには釘まで一体になって運動を続けていくという話です。つまり、その経験の中から自己と世界がもう一度立ち上がって来る。僕は現象学をベースにした人工知能が作れるのではないかと考えています。
本稿では「人工知能のための哲学塾」の概観を説明しました。本に収録されている全五夜の中で、ふたたび、今日ご紹介した哲学者の名前を何度も目にすることになるでしょう。
目的と価値消失
#カルチャーはお金システムの奴隷か?
日本人が知らないカルチャー経済革命を起こすプロフェッショナルたち




